Motor and reducer(with content) — motor, V-belt, Sumitomo reducer; mounting, tensioning, and shaft extension questions.
Gears and cam bearings(with content) — gear train, cam rollers, lubrication; interface to transmission yoke.
Drivetrain mount plate(with content) — mount plate on frame; shimming/dowelization workflow and stiffness requirements.
Introduction
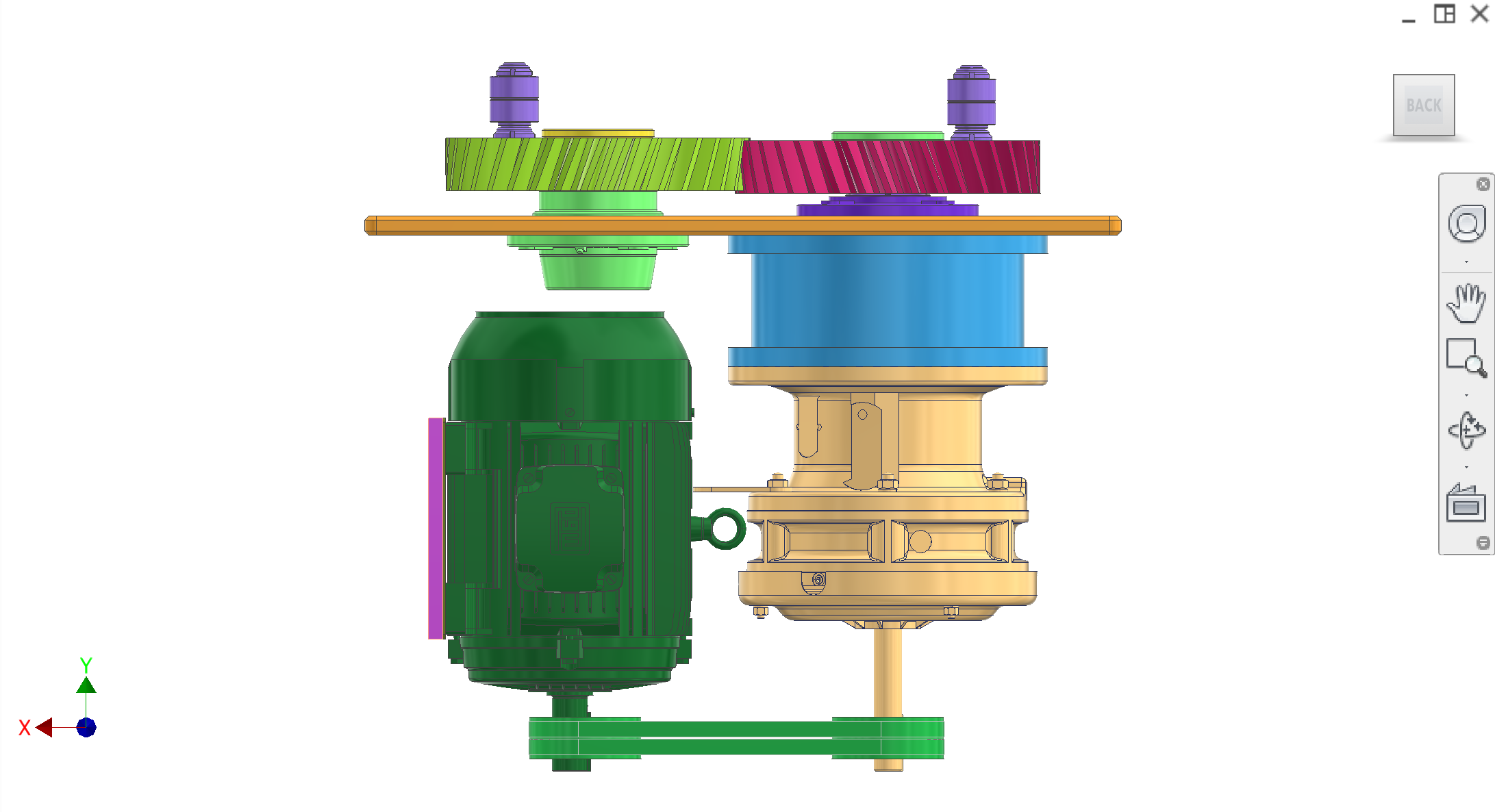
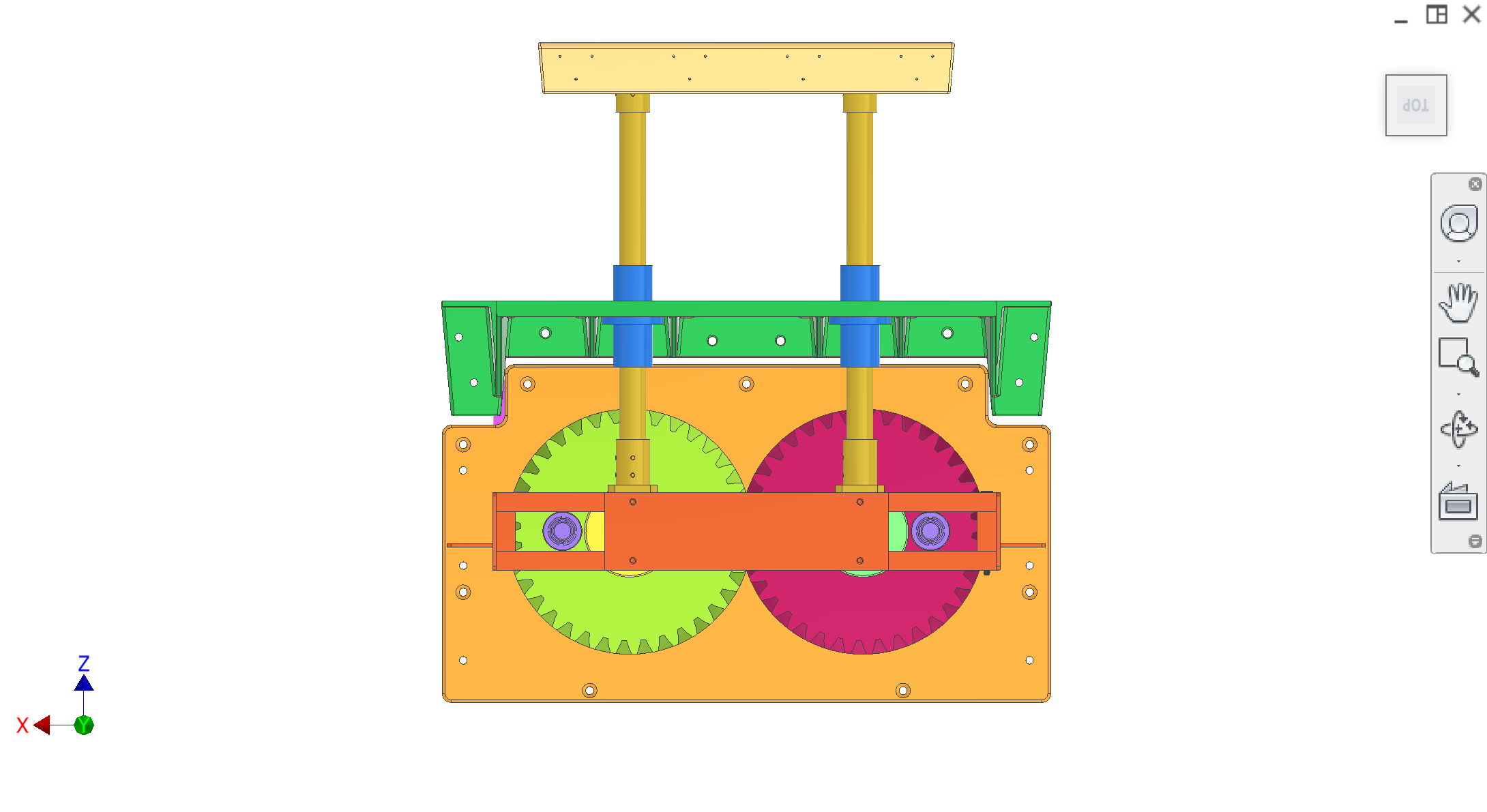
Motor → V-belt → reducer → gear train → cam bearings → interface with transmission yoke. Mounts on drivetrain mount plate (frame). This subsystem is the primary source of torque, vibration, and cyclic loading into the machine structure.
Locating capped roller bearing unit — SKF F4BRP 208-SRB-CRH (locating, capped/end-cover option). Used under the passive gear to locate axially.
Non-locating roller bearing unit — SKF F4BRP 208-SRB-CLE (non-locating). Used to support the Sumitomo reducer output shaft side while allowing axial float.
Reducer spacer — sets reducer standoff/position so pulleys and shafts stay in plane.
Sumitomo Cyclo 6000 reducer — speed reduction and torque increase between motor and gear train; lubrication/mounting per Sumitomo manual.
V-belt — DIN 2215 17×957, 2-belt, 1000 mm
WEG W22 1450 rpm motor — prime mover for the drivetrain; final electrical/mechanical specs TBD.
Stainless motor mount spacer — positions motor/pulleys for belt alignment; resists compression under bolt preload.
Wooden motor mount plate — motor mounting base; provides adjustability for belt tensioning (material may change in final design).
Figures
Drivetrain: motor, reducer, belt, gear train, cam bearings. Refer to figures as Figure 1, Figure 2, etc.
Status — CAD exists for the drivetrain layout and interfaces, but final specifications (belt center distance, gear module/profile, helical angle decision, detailed bearing selection/arrangement) are still being developed.
Prime mover — WEG W21/W22 IE3 motor, product number 13533507: 7.5 kW (10 hp), 50 Hz, 4-pole, rated speed 1460 rpm, rated torque ~49 N·m, 38 mm shaft.
Drive — SPA belt drive, currently assumed 1:1 ratio (170 mm pitch diameter pulleys on motor and reducer), two belts planned; center distance and tensioning mechanism are TBD and drive significant radial load into the mount plate.
Reducer — Sumitomo Cyclo 6000 series; output speed target ~70 rpm. Reducer output torque drives the gear train which drives cam bearings for reciprocation.
Known issues & risks
Vibration + cyclic loading into frame — Motor/reducer and belt tension introduce vibration; cam-yoke reciprocation adds cyclic force content. Joints (bolts + dowels) must be designed to avoid slip/fretting.
Belt tension / radial loads — Center distance and tensioning method are not finalized; belt tension sets radial loads on motor/reducer shafts and the mount plate, and affects bearing life and noise.
Gear design not finalized — Module (likely 6 or 8), spur vs helical, contact ratio, hardness/heat treatment, and backlash targets are not finalized. These choices dominate fatigue life, noise, efficiency, and manufacturability.
Load concentration at bearings — The driven gear and tapered roller bearing region sees high forces and moments that must be carried into the drivetrain mount plate and frame without excessive deflection.
Shaft/bore mismatch + custom extensions — The SKF mounted bearing unit bore (e.g. 63.5 mm nominal for F4BRP 208 units) does not exactly match the Cyclo 6000 reducer shaft geometry in the current concept. Both reducer input and output shafts also need extension for the machine layout. Custom shaft extensions/adapters (or alternate bearing selection) are required; contractor to propose the safest/most manufacturable approach.
DFM & manufacturing (China)
Gear manufacturing plan — Contractor to propose gear material and heat treatment, tooth finishing, achievable tolerances, and inspection (profile, lead, runout, backlash). Prefer China-available processes and vendors.
Bearing arrangement — Contractor to review locating/non-locating scheme, preload strategy, and how to inspect/maintain. Provide alternates if current SKF parts are hard to source locally.
Mounting + service — Design should allow belt tension adjustment, pulley alignment check, and reducer service without removing large assemblies unnecessarily.
Optimizations sought
Reliability — Long fatigue life for gears and bearings under cyclic loading; robust to misalignment.
Noise + efficiency — Acceptable noise for an industrial juicing line; keep losses manageable.
Serviceability — Quick belt replacement, tension check, and access to lubrication points.
Weight reduction — Driven gear weight reduction is desired if it does not compromise stiffness, contact stress, or manufacturability.
Questions for contractor
Validate the motor/belt/reducer configuration and propose a robust belt tensioning approach (center distance, adjustment range, target belt tension, and resulting radial loads).
Using final gear geometry, validate drivetrain load cases. Current preliminary figures: reducer output speed ~70 rpm; driven gear torque ~1023 N·m; estimated gear mesh forces ~6.6 kN tangential and ~7.2 kN normal (to be validated).
Recommend final gear module/profile (spur vs helical) and heat treatment/finishing for fatigue life and China manufacturability. Provide suggested backlash and contact pattern targets.
Review bearing arrangement (including tapered roller bearing under driven gear and cam-bearing shafts). Propose alternates, preload strategy, and expected life/maintenance intervals.
Propose a complete shafting solution for the reducer input and output, including any required shaft extensions/adapters, tolerances, and an assembly plan. Address the bore mismatch between the Cyclo 6000 shaft(s) and the selected mounted bearing units.
Recommend acceptance checks for as-built drivetrain: backlash range, runout, alignment, vibration/noise checks, and a simple load test.
Supply chain & alternates
Motor — WEG motor is currently specified; contractor to propose China-available equivalents if substitution is acceptable.
Reducer — Sumitomo Cyclo reducer currently assumed; contractor to propose equivalents or local sourcing options with similar performance and footprint.
Bearings — SKF part numbers exist in CAD for some bearings; contractor to propose locally available equivalents where needed.
Expected deliverables & acceptance
Deliverables — Finalized drivetrain design package including motor+reducer mounting, belt tensioning method, gear drawings/specs (material/heat treat), bearing arrangement, and a load-case summary for mount plate reactions.
Acceptance — Drivetrain runs smoothly at target speed without abnormal vibration/noise; gear contact pattern and backlash within targets; no joint slip at mount interfaces under cyclic load.
Component summaries
Bearings — support shaft rotation, reduce friction, and need regular inspection/greasing to maintain life.
Plunger drive rods — connect the drivetrain/yoke to the core ejection plungers; alignment is critical so rods run freely through their linear bearings.
Yoke — joins the plunger drive rods and converts rotary motion from the cam bearings into the linear stroke for extraction and core ejection.
Plunger pull / drive bracket — links the rods to the plungers and keeps all four plungers moving together; requires precise alignment with the filter tube and plug cutter.
Sumitomo reducer — reduces motor speed and increases torque; follow the Sumitomo manual for mounting, lubrication, and maintenance intervals.
Reducer mount — locates and supports the reducer on the drivetrain mount plate so the motor, belt, and gears stay in alignment under load.
Two gears — transmit torque from the reducer to the cam bearings; spacing and backlash must be set so teeth share load without binding.
Drive belt and motor transmission — couple the WEG motor to the reducer; belt tension and alignment should be easy to inspect and adjust.
Pulley guard — prevents accidental contact with the belt and pulleys and should be removable for maintenance but secure in normal operation.
Interfaces
Input: WEG W21/W22 IE3 motor → V-belt → Sumitomo Cyclo 6000 reducer.
Output: Cam bearings interface with yoke of transmission subsystem.